現代の自動車におけるADASと車両コネクティビティの理解
車両の安全性を高める先進運転支援システム(ADAS)
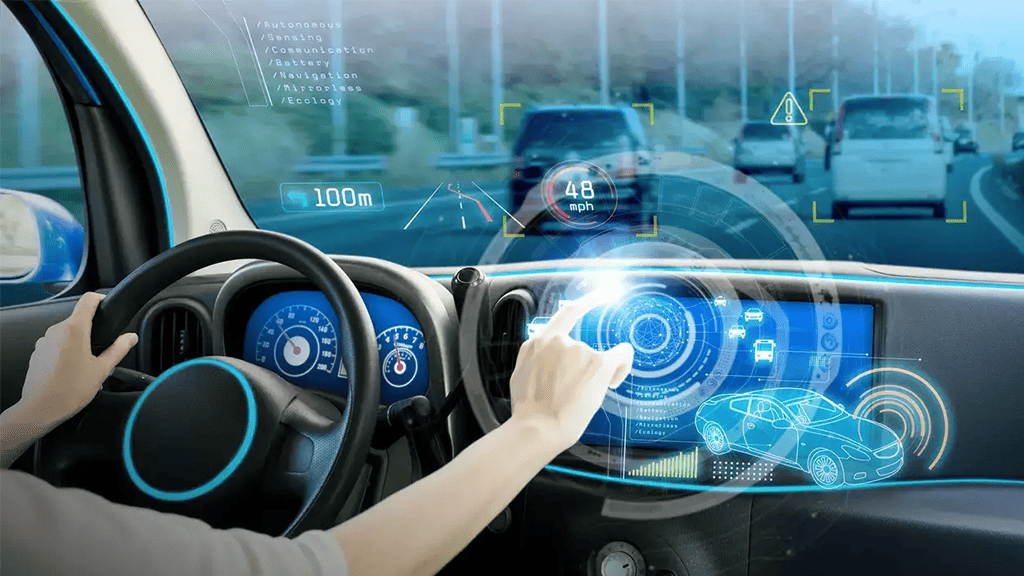
自動車業界は近年、大きな変革を遂げており、車両の安全性を高め、運転体験を向上させるために、先進技術の導入が進む傾向にあります。この分野における最も顕著な進歩の一つが、先進運転支援システム(ADAS)の登場と普及です。ADASとは、運転中のドライバーを支援し、運転をより安全、効率的、そして便利にする高度な技術の集合体です。
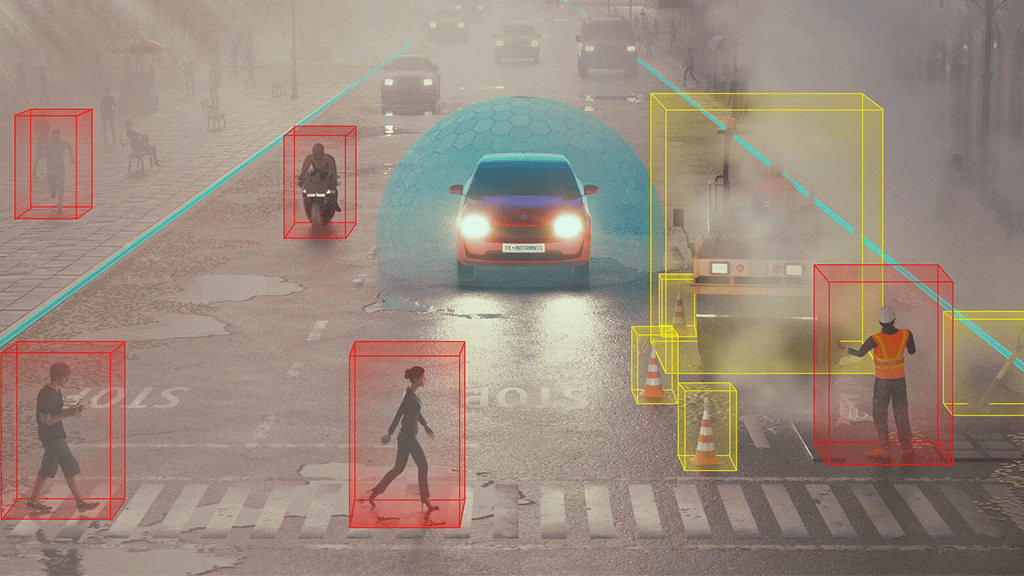
ADASは、センサーシステム、人工知能、機械学習アルゴリズムを活用した幅広い機能を網羅し、車両の周囲を認識し、潜在的な危険を識別し、事故を防止するためにタイムリーな警告や介入を提供します。これらのシステムは副操縦士として機能し、現代の複雑な道路状況においてドライバーに重要な支援を提供します。
ADASは効率性も向上させ、燃料消費を最適化し、排出量とコストを削減する最適なルートを提案します。自動運転への足掛かりとなり、交通に革命をもたらします。道路安全への意識が高まるにつれ、ADAS搭載車の需要が急増し、メーカーやテクノロジー企業はより安全で便利な移動を実現するために、ADAS搭載車を迅速に導入しています。
米国運輸省道路交通安全局(NHTSA)が実施した調査によると、先進運転支援システム(ADAS)を搭載した車両は、追突事故の減少に顕著な効果を示していることが分かりました。この調査では、自動緊急ブレーキや前方衝突警報などのADAS機能を搭載した車両では、追突事故が40%も減少するという驚くべき結果が得られました。この統計は、ADASがドライバーに衝突の可能性を警告し、さらには自動的にブレーキをかけて事故を回避することで、事故を予防し、道路の安全性を向上させる上でいかに役立つ技術であるかを浮き彫りにしています。
ADAS と自動運転の違いは何ですか?
テクノロジーの進歩に伴い、交通の世界は急速な進化を遂げています。車両はよりスマート化、自動化が進み、安全性と効率性の向上に重点が置かれています。この変化を推進する2つの技術は、ADASと自動運転です。
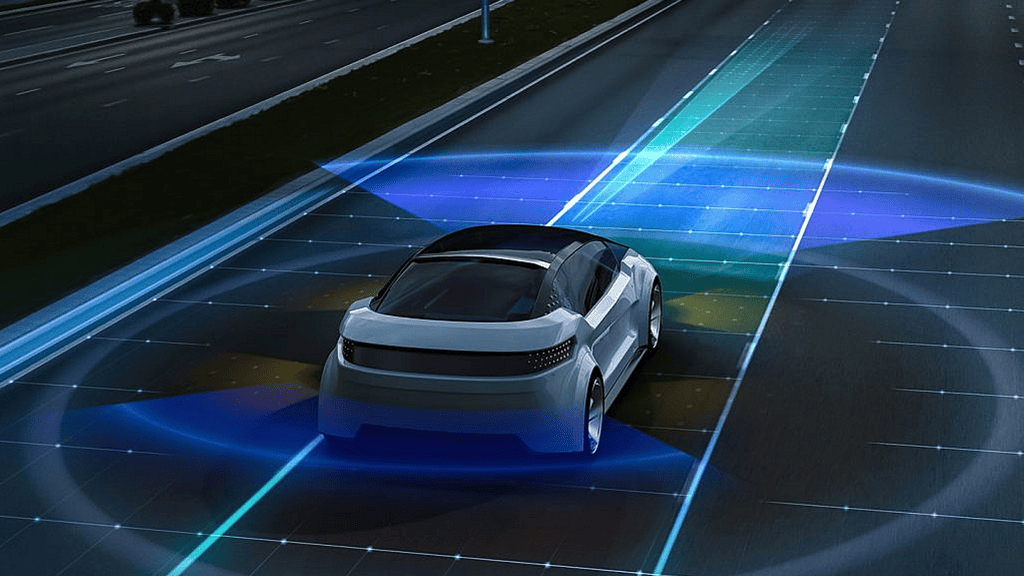
自動運転は、セルフドライビング技術または無人運転技術とも呼ばれ、人間の介入なしに運転できる車両を指します。
これらの車両は、様々なセンサー、アルゴリズム、機械学習を用いて環境をナビゲートし、運転行動を決定します。自動運転車は、安全性の向上、交通渋滞の緩和、運転できない人々の移動性の向上など、交通に革命をもたらす可能性を秘めています。
ADASと自動運転の違いは、その自律性のレベルにあります。ADASは、ドライバーが運転プロセスに関与することを必要としながらも、ドライバーを支援するように設計されています。一方、自動運転技術は、ドライバーの介入を完全に排除し、車両が人間の介入なしに自律的に運転することを目指しています。
ADASと自動運転技術はどちらも道路上の安全性と効率性を向上させる可能性を秘めていますが、それぞれに明確な利点と限界があります。ADAS機能はドライバーに有益な支援を提供しますが、万全というわけではなく、ドライバーは常に注意を払い、制御を維持する必要があります。自動運転技術は、人為的ミスによる事故件数を大幅に削減する可能性を秘めていますが、まだ開発の初期段階にあり、規制や社会的な課題に直面しています。
自動運転
トップダウンアプローチとダウントップアプローチは、自動運転における自動化の実装における2つの異なる戦略です。以下に、両者の比較を示します。
範囲: トップダウン アプローチは全体的なシステム アーキテクチャと設計に重点を置き、ダウントップ アプローチは個々のコンポーネントとその統合に重点を置きます。
複雑さ: トップダウン アプローチは、すべてのサブシステムを一緒に設計して統合する必要があるため、より複雑です。一方、ダウントップ アプローチは、個々のサブシステムとそれらのシステム全体との統合を扱います。
実装: トップダウン アプローチではシステム レベルの完全な理解と専門知識が必要ですが、ダウントップ アプローチは個々のサブシステムの専門家によって実装できます。
時間とコスト: トップダウンアプローチは、システム全体の設計と統合が必要となるため、より多くの時間とリソースを必要とします。一方、ダウントップアプローチは、個々のサブシステムを個別に設計・テストできるため、時間とコストを削減できます。
柔軟性: ダウントップアプローチは、システム全体に影響を与えることなく個々のサブシステムに変更を加えることができるため、より柔軟です。トップダウンアプローチは、1つのサブシステムへの変更がシステム全体に影響を与え、さらなる変更が必要になる可能性があるため、柔軟性が低くなる場合があります。
トップダウンアプローチはシステム全体のアーキテクチャと設計に焦点を当て、ダウントップアプローチは個々のサブシステムとその統合に焦点を当てます。トップダウンアプローチはより複雑で時間がかかる場合がありますが、ダウントップアプローチはより柔軟で低コストです。最終的には、開発対象の自動運転システムの具体的な要件と目標に応じて、どちらのアプローチを選択するかが決まります。

ADASを含む自動化の5段階
自動化の5段階(SAEレベルとも呼ばれる)は、車両の自動化レベルを定義する標準的な分類システムです。レベルは、自動化が全く行われていないレベル0から、完全自動化を表すレベル5まであります。ADASは、レベル1とレベル2の自動化のカテゴリーに該当します。
レベル1の自動化 とは、車線逸脱警報(レーンデパーチャーウォーニング)、アダプティブクルーズコントロール、自動緊急ブレーキなど、限定的な運転支援を提供するシステムを指します。これらのシステムはドライバーに一定の支援を提供しますが、道路状況を監視し、必要に応じて車両を制御する責任はドライバーにあります。
レベル2の自動運転は、部分的な自動運転を提供するシステムです。これらのシステムは、高速道路や渋滞時など、特定の条件下で車両の操舵、加速、制動を制御できます。ただし、運転者は常に注意を払い、いつでも車両の制御を引き継げるように準備しておく必要があります。
レベル3の自動化は、まだ広く普及していませんが、条件付き自動化を提供するシステムです。これらのシステムは、高速道路など特定の条件下ではほとんどの運転タスクを処理できますが、ドライバーはシステムの指示に応じて車両を制御できる準備ができていなければなりません。
レベル4の自動化は、 高度な自動化を実現するシステムです。これらのシステムは、特定の条件下ですべての運転タスクを処理でき、ドライバーが車両を常に監視して制御する準備をする必要はありません。
レベル5の自動化は、 完全な自動化を実現するシステムです。これらのシステムは、あらゆる状況下ですべての運転タスクを処理でき、ドライバーは車両に搭乗したり、運転タスクを監視したりする必要はありません。
ADASの未来:運転自動化の度合いの向上
先進運転支援システム(ADAS)は、完全自動運転の実現という究極の目標に向けて、ますます高度化・洗練化しています。技術の進歩に伴い、ADASの将来においては、運転の自動化がさらに進むことが期待されます。
現在、ほとんどのADASシステムは、車線維持、アダプティブクルーズコントロール、自動緊急ブレーキなどの運転支援を目的として設計されています。これらのシステムは、ドライバーの継続的な注意と介入を必要としますが、事故の低減と運転の安全性向上に貢献します。
将来、ADASシステムは、交通状況の把握や車線変更といった運転タスクをより高度なレベルで代替できるようになると予想されています。そのためには、より高度なセンサーと処理能力、そして車両間の連携を可能にするより堅牢な通信システムが必要になります。
運転の自動化が進むにつれて、ドライバーの役割は変化します。ドライバーはより乗客のような存在となり、車が運転を引き継ぐ間、リラックスしてドライブを楽しむことができるようになるかもしれません。
全体的に、ADASの将来は運転の自動化度が高まり、運転の安全性と利便性が大幅に向上する可能性があります。